曾光亮(台電退休員工) 李晉元(龍門施工處)
前言
龍門核能電廠的儀器控制系統係採用分散式暨資訊系統(Distributed Control and Information System‐DCIS),由美國奇異公司負責核島區部分之概念設計,其中有關核能特殊安全設施(SSLC/ESF)儀控系統的概念設計完成後,交給同為美國的DRS Consolidated Controls, Inc.(原EATON公司)進行細部設計並提供整個系統及設備。DRS所提供系統是採用PERFORMNET (Performance Enhanced Redundant Fiber Optical Replicated Memory Network)為通訊網路主幹之Plμs32控制系統,該系統主要的設備包括RMU/SSLC機櫃、VDU、NIM、CIM、及BTM等,在RMU/SSLC機櫃內還裝有11種不同的通訊與控制模組,2部機組共約需3100個控制模組,加上NIM、CIM及BTM等通訊模組,數量可謂相當龐大。因此爾後的模組維修工作勢必非常繁重。有鑑於此,DRS自行發展一種操作簡單、用途很廣的可攜帶型診斷器,以提供電廠維護人員在維修時使用。
一、概述
可攜帶型診斷器(以下簡稱診斷器)係供DRS Plμs32 系統中各模組維修之用,當診斷器連接到機櫃之網路通訊模組(NIM)時,就可以與機櫃內所有的模組逐一做診斷。若連接到個別的模組時則僅可對該模組做診斷。診斷器具有系統中各模組的診斷螢幕,當連接到一個模組後就可以讀取該模組的位置並顯示診斷畫面。診斷器也可以隔離每一個模組以便做模組之維修及測試模組之邏輯電路,當模組被隔離時,在主控制內的顯示器(VDU)會產生警報以告知值班人員。
診斷器係一種簡單的筆記型電腦,它包含有預先載入的軟體及一條預製電纜(9-Pin)以供診斷器COM埠及模組Diagnostic埠(參見圖片)間之連接,其各項的編號如下列所述:
-
可攜帶型電腦 KAC457
-
操作系統軟體 KB389B
-
圖示系統軟體 KC389AE
-
應用軟體 KEU3921
-
電纜 KYB2314
各個模組Diagnostic埠圖片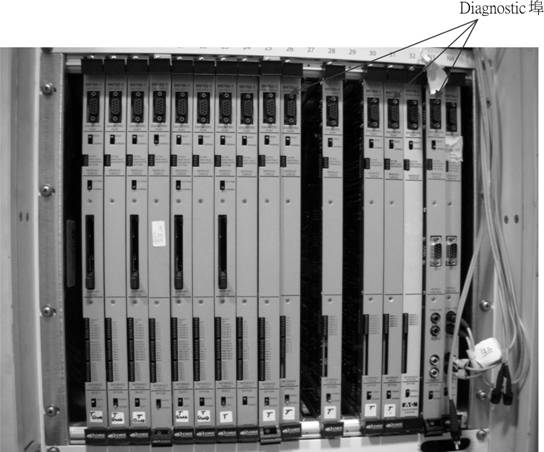
二、診斷器在Plμs32系統維修上之應用
本節將介紹如何利用診斷器對網路通訊及控制模組的相關問題做診斷,其中網路通訊模組包括NIM及CIM兩種,BTM則因沒有設計Diagnostic埠可以連接診斷器,故僅能用模組上的指示燈做診斷。
警 告
假如網路不用時,診斷器仍可用來診斷特定的機櫃,但因診斷器本身係屬非安全設備,當連接至任何機櫃時,須小心使用,假如機櫃正執行安全功能時,診斷器不得連接至機櫃。
在診斷器連接到控制模組或網路通訊模組之前,必須連鎖所有由該機櫃控制的設備而且執行的模組應置於復原(Reset)狀態以作隔離並將跳線組件KCH3900-1從適當的I/O端點移除。
在網路(PERFORM Net)上有四種不同型式的節點(Nodes)及一種型式的Repeater,前者為包括NIM, CIM, BTM及VDU之設備且均有一個複製記憶體模組,後者則為Quad Switch且沒有複製記憶體模組。
關於如何利用診斷器對網路通訊模組(NIM)做診斷,可分成三部分討論,首先要瞭解網路結構,然後再探討可能發生的問題型式,最後再去分析各個網路組件產生的現象。在網路上有許多環境因素可以導致系統不可靠或錯誤的結果。譬如安裝得宜與否,網路通訊模組發生故障時立即通報及所有光纖ST 連結器清潔等,均可避免網路不可靠及錯誤的發生。在安裝階段,對一些使用長距離光纖之連結,其信號傳輸延遲時間誤差(skew error)應做調整。這種誤差是由於PERFORM Net網路使用兩條光纖來傳輸資料且每條光纖具有75Mbps的傳輸容量以符合150Mbps之傳輸頻寬。分成兩條路徑傳輸的信號當到達目的地後再合併為原始的資料。但是若其中一條光纖比另一條長時,信號傳輸至接收端將會產生不同步的現象。為了使信號在達到接收端時能夠同步,則要調整兩條光纖長度以解決延遲時間差的情形。其次,當光纖的ST接頭拆接時,容易造成網路的中斷。大部分網路的問題都出自不當的光纖信號傳輸延遲時間差調整、ST 接頭的拆接或拆接過程中灰塵的侵入。
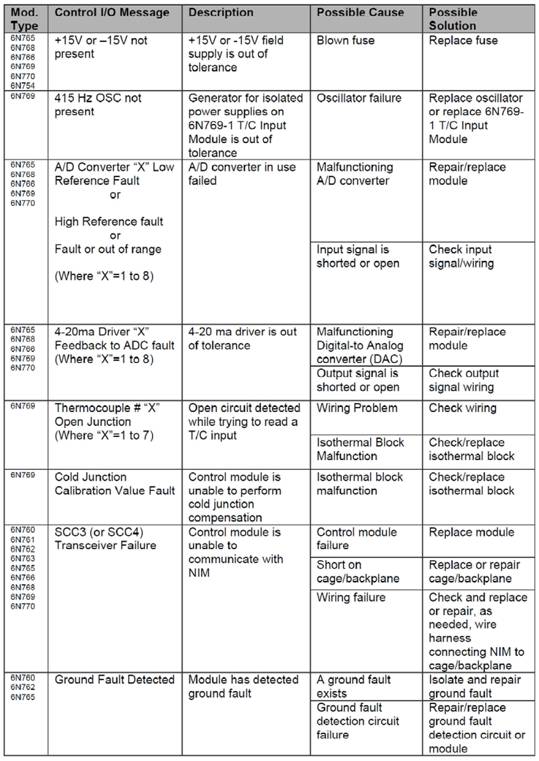
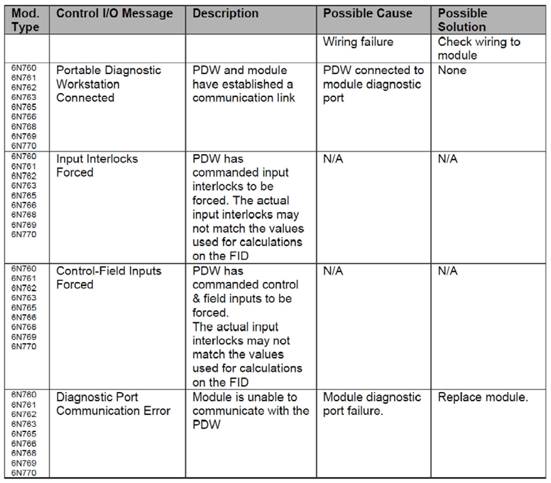
表1係由NIM或CIM所提供的網路診斷及維修相關資訊,表2、表3及表4則分別由NIM, CIM及Control I/O Module 藉由診斷器所提供的網路診斷及維修相關資訊,其中大都是歸因於不正確的設備組態。
在網路穩定及節點(Nodes)間的所有光纖已完成信號傳輸延遲時間差的測試調整之後,網路如果再發生錯誤將可以判定是接在節點上的設備故障所引起的。
下列所述的診斷程序將有助於肇因之判定。(尤其對診斷NIM/CIM所發生之”Network Isolation Error”特別有用)。
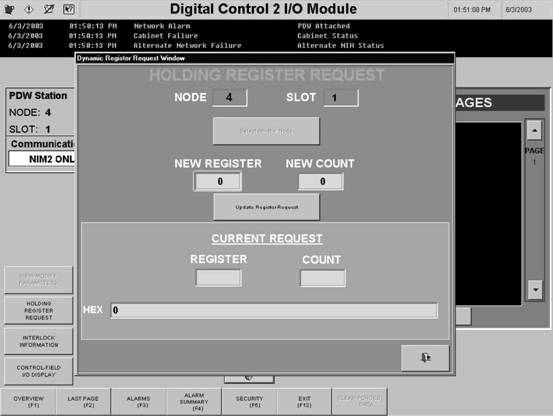
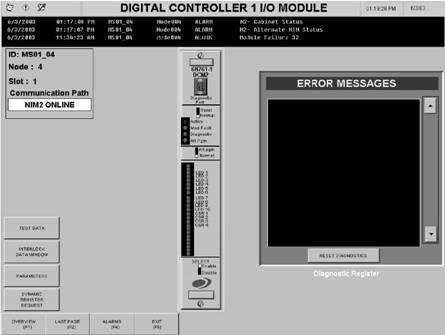
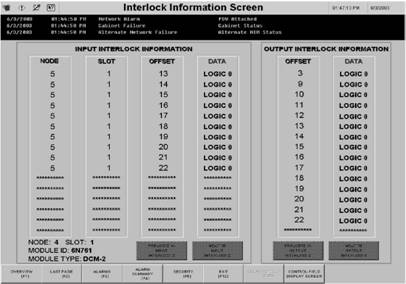
當診斷器接至網路通訊模組時,在其畫面上(如圖一所示)可以讀取HR(Holding Register)值。診斷網路問題最重要的HR 值為44-45(PNET Address of Foreign Write)及46-47(PNET Data at Foreign Write Address)。對有疑問的網路卡(NIM/CIM)可以利用診斷器的Holding Register Request畫面並在“NEW REGISTER”欄位輸入44及“NEW COUNT”欄位輸入2。NEW REGISTER是HR 的起始值而NEW COUNT 是所要讀的位元組數。所以輸入以上指令後可以讀得HR44 和HR45總共2Bytes的值。至於畫面上所示的回報值(Return Value)代表可能有異常寫入(Foreign Write)錯誤信息的位址。(註:Foreign Write的定義是把資料寫入不屬於該節點的PERFORM Net 複製記憶體4K區塊中。例如,節點0AH只可以寫0A000H到0AFFFH的複製記憶體位址。)
圖一、PDW Holding Register (HR)畫面
譬如回報值為“0001_7DEE”,有可能表示因所偵測到異常寫入錯誤的網路通訊模組位址為017DEEH,由此並可以告知大家該問題網路通訊模組的節點(Node)為17H或2310,應予更換。惟有時會因ST接頭的拆接而偵測到假的異常寫入錯誤訊息,進而使網路中的網路通訊模組(NIM/CIM/BTM等)產生NET FAULTS信號。發生此種情形時,應優先將這些假信號予以清除。
正常寫入的資料可經諮詢HR 46-47予以讀取其回報值,經諮詢HR 46-47所顯示之回報相關資料說明如下:
Digital Data: Logic 0代表Nod ID ex. 25H for FALSE
Logic 1代表NOT(Node ID) ex. 0DAH for TRUE
(以上均各佔用1Bytes)
Analog Data: (各佔用3Bytes)
|
Address
|
0000
|
0001
|
0002
|
|
Data
|
Analog Hi Byte
|
Analog Low Byte
|
Checksum
|
Data Validation: 0=(An Hi)+(An Lo)+(Node 1D)+checksum
或Checksum=NOT((Node ID)+ (An Hi)+(An Lo))+01H
這一公式代表資料的有效性應該是最後計算結果為0。
假設節點25H要寫入一筆類比連鎖資料0801H,那麼其傳送的連鎖資料將是0801D2H。“0801”代表16位元資料。至於2's補數Checksum是0D2H = NOT(08H + 01H + 25H) + 01H。
引起網路通訊模組發生NET FAULT信號的情況有很多種,最易於發生的情況為安裝時所造成信號傳輸時間延遲差的錯誤或光纖有斷裂。在確定網路穩定後,若網路發生故障現象,應按前述用診斷器查詢網路通訊模組之HR值44-47予以診斷。
表1 PERFORM Net Diagnostic Messages and Troubleshooting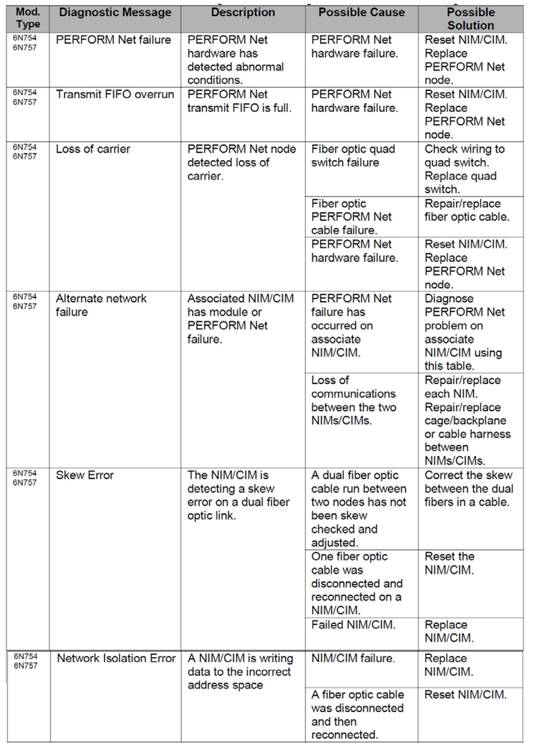
表2 PDW NIM Messages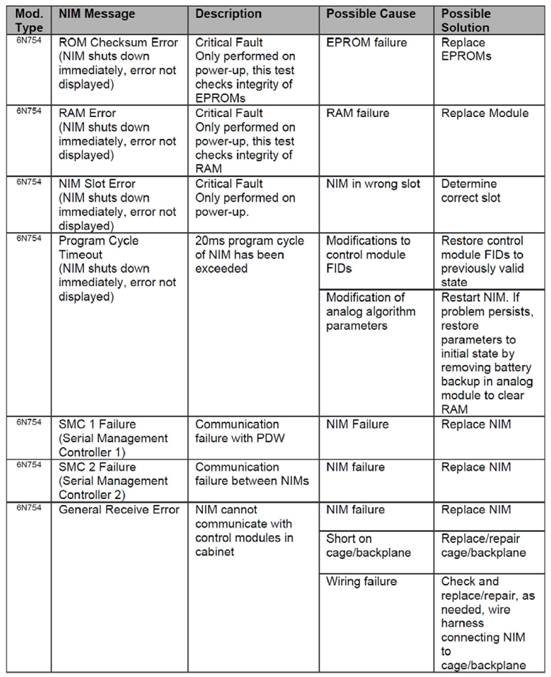
表2 (續)
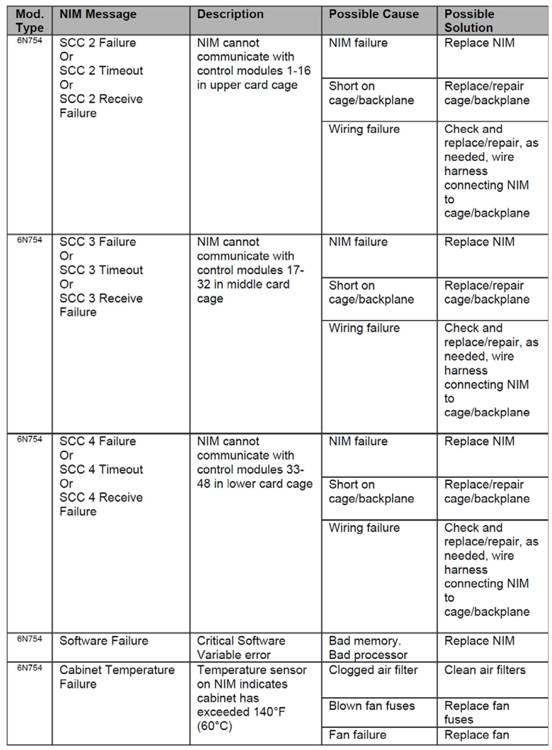
表2 (續)
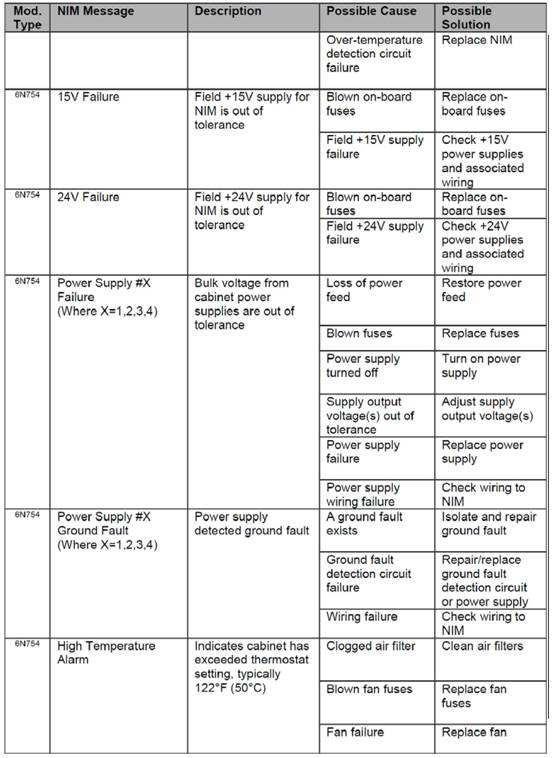
表2 (續)
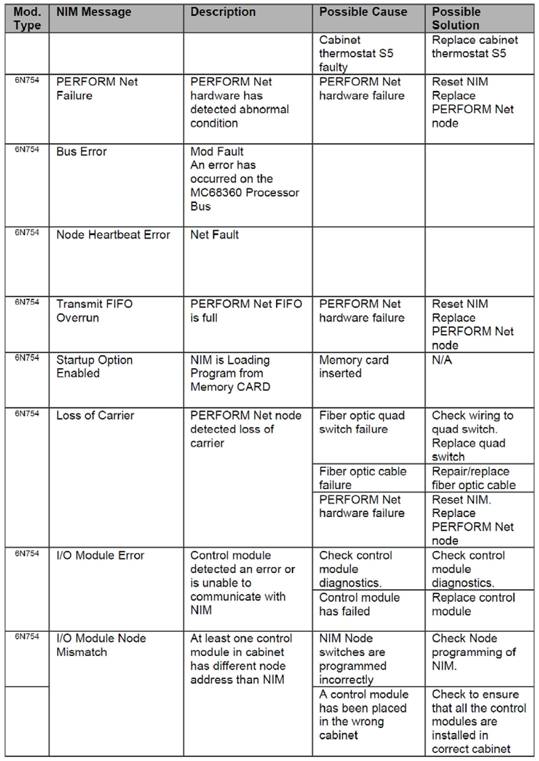
表3 PDW CIM Messages
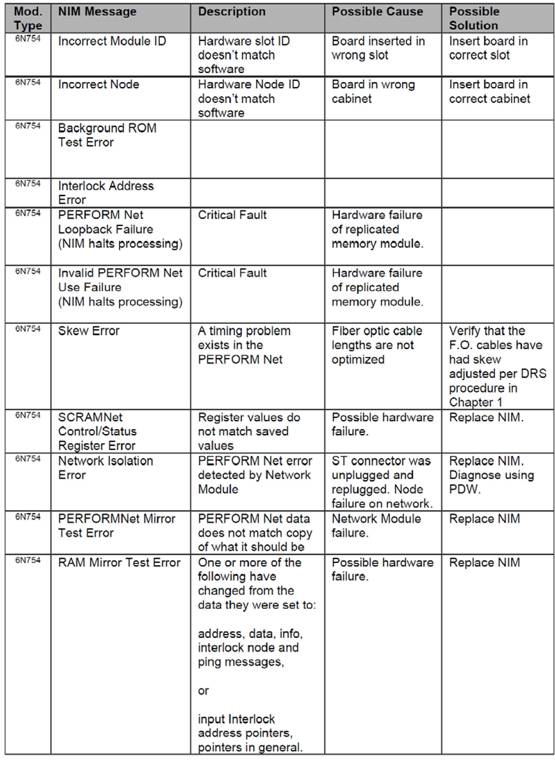
表3 (續)
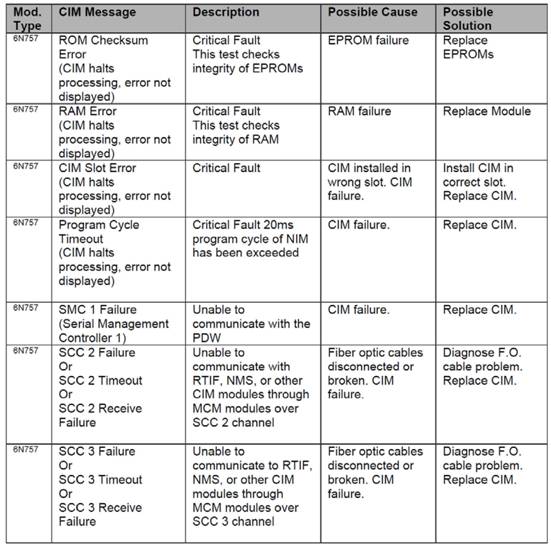
表3 (續)
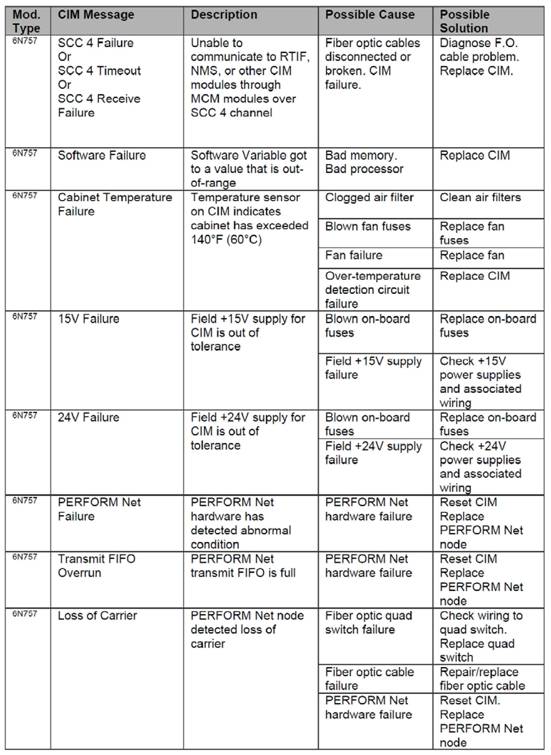
表4 PDW Control I/O Module Messages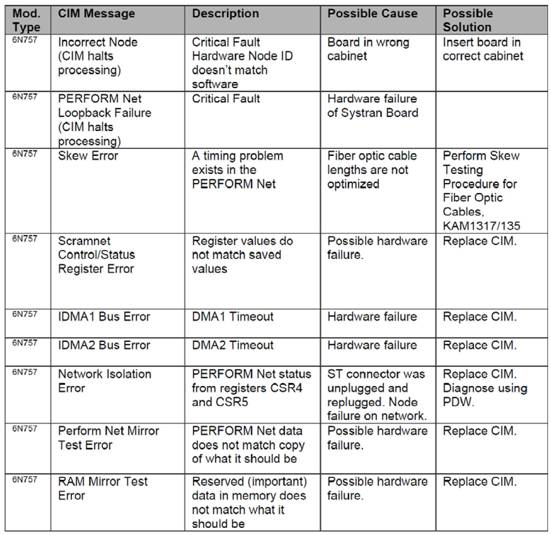
表4 (續)
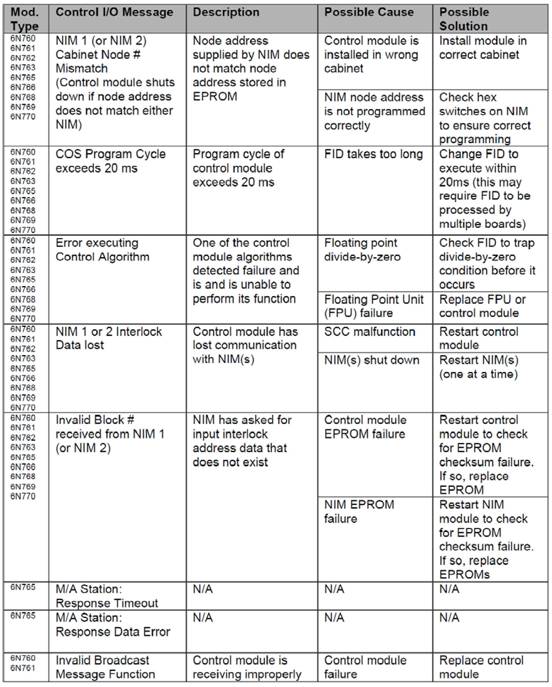
表4 (續)
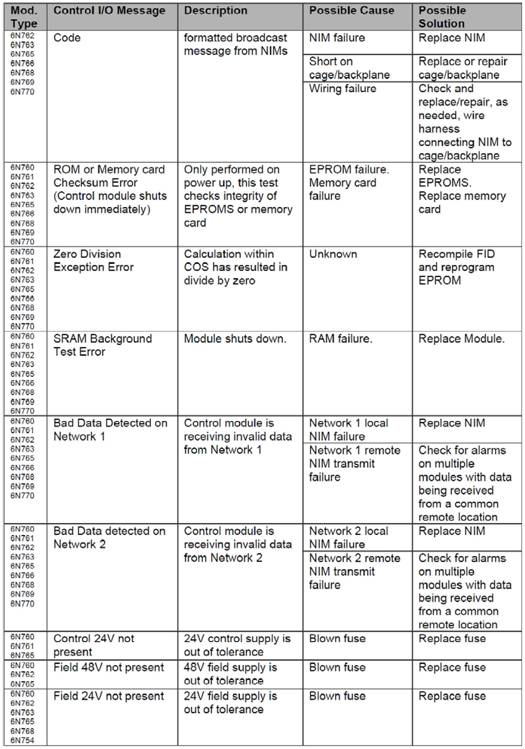
表4 (續)
三、診斷器(PDW)的連鎖功能
當需要驗證輸出功能時,診斷器可以在不改變輸入情況下,診斷器可以啟動強制連鎖值以驗證該功能,但必須在Functional Interconnect Diagram (FID)加入如以下所述的功能函數。
以下兩個功能函數可以提供數位值的輸入連鎖(Input Interlock)及輸入控制(Input Control)&現場輸入(Field Input)等信號。利用這兩種功能函數並不會改變VDU的顯示狀態。由於二者的Variable With Initial Value (VWIV)輸出並未予以使用,在FID 的編譯過程中將會產生兩個警告的信息。N78及N79代表兩個功能函數如下圖所示。

注 意
|
啟動強制連鎖功能是將控制系統旁路因而不能符合IEEE603的Alarm /Notification需求。
|
惟有下列各特殊情況,在FID 有需要啟動強制輸入連鎖及控制/現場輸入。
Field第一個部份為FI,其初始數值(VWIV)係啟動診斷器輸入連鎖功能(Input Interlock)
Field 第一個部份為FC,其初始數值(VWIV)係啟動診斷器控制&現場輸入信號(Control & Field Inputs)
有關診斷器連鎖功能視窗,將在圖二、三、四、五、六中說明各種不同情況的功能設定與操作。如果該模組有啟動強制連鎖功能,則可以利用這些畫面強制連鎖輸入。
圖二、PDW DCM 1畫面
畫面上的LED指示燈與實際模組面板的指示燈一致。
圖三、PDW連鎖資訊畫面
在前圖二上按“Interlock Data Window”鍵即可出現本畫面。如果在FID上啟動連鎖功能,則該模組可用此畫面完成”連鎖輸入”(Input Interlock)。
圖四、PWD連鎖登入畫面
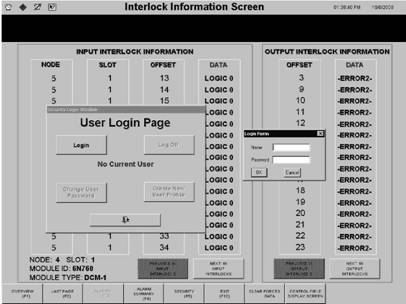
使用人必須登入後才可下連鎖之指令。首先要按下“F5”後,再輸入使用人名字及密碼(operator/ operator),並按下”OK”,此時即可進行修改。
圖五、PDW類比連鎖畫面
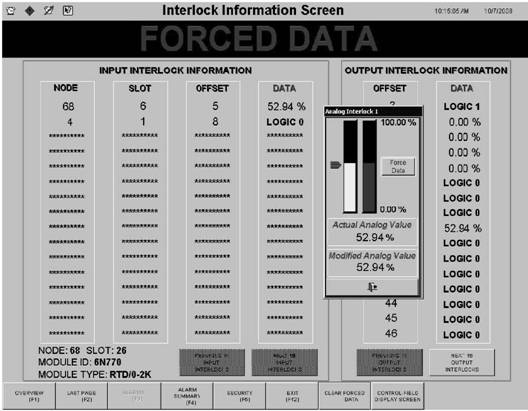
在畫面上選取“Data”列中的類比值(%)並以左鍵按下就會出現“類比連鎖”視窗,敲下左邊條狀後即可進行修改至所需之值,並按下“Force Data”即完成修改工作。該值需經一些時間才可確定,在畫面上同時顯示實際類比設定值及修訂值,另在主畫面“輸出連鎖資料”欄內亦會顯示修訂值。在完成修改後即可在本畫面下方按下“離開”,如果需要將連鎖資料取消,可在主畫面下方按下“Clear Forced Data”即可。
圖六、PDW數位連鎖畫面
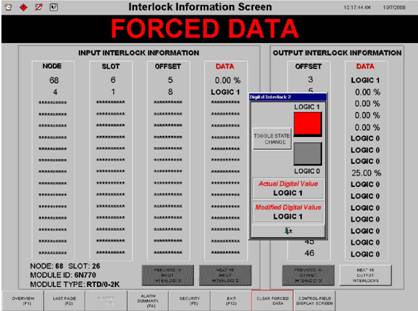
在畫面上選取“DATA”列中的LOGIC # 並以左鍵按下就會出現“數位連鎖”視窗,敲下“Toggle State Change”可以變更數位值,該值需經一些時間才可確定,在畫面上同時顯示實際數位設定值及修訂值,另在主畫面“輸出連鎖資料”欄內亦會顯示修訂值。在完成修改後即可在本畫面下方按下“離開”,如果需要將連鎖資料取消,可在主畫面下方按下“Clear Forced Data”即可。
四、診斷器變更參數(設定點)值的方法
為符合變更運轉情況(如電廠起動)常需修改參數值或是其臨限值,診斷器可用來修改這些參數值以配合已經燒錄允許更改之FID,下圖為兩種FID中可以用來修改參數值的符號之一。

這一個符號稱為初始值(VWIV-variable with Initial value)從此資料中,可以發現浮點數及整數間的符號差異,龍門電廠目前所有的FID 均設定為“W”,即允許從操作員工作台(VDU)上修改其初始值,惟VDU 並沒有修改初始值的能力,只診斷器才有此修改初始值的能力。當診斷器連接到網路通訊模組(NIM)時,該模組則認定診斷器為工作台,因此所有的修改必須依目前FID所錄製之初始值經由網路通訊模組來完成。
注 意
在電廠起動時已將參數建置為允許修改設定點,一旦最終設定點確定,在所有FID上的初始值將變為固定的設定點之值。在儲存修改之初始值位置係由電池作支援,遇有電池故障時會使設定值回到原FID上的初始值。
這裡將舉一例說明診斷器的操作方法。在前所示之符號中,FI包含有初始值,即其“標的數據”及“可修改狀態”等,所採用的數值係浮點數,其內容可以經由修改其Analog Variable邏輯元素中的第一個部份而改變。
上述符號之編碼為XXX Ysnnnn.n 其中XXX為初始值之序數由1至119間任一數
Y是在定義“可修改的狀態”,
設Y=D 表示可由診斷器修改初始值設Y=W 表示可由VDU 修改初始值S為Optional signnnnn.n為可變的數值(-9999.9~9999.9)
舉一個已完成1H12PL11090-06 VW1V#17的例子。
17即為初始值之序數,180.7即為初始值
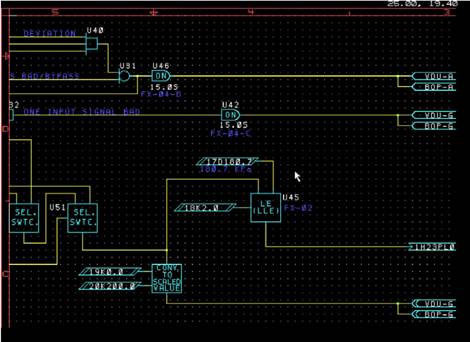
因為FID係以ORCAD軟體所程式編定,所以在ORCAD的畫面所示題之F1值如圖七所示,其F1值中之W改設定為D後,初始值將可由診斷器上做修改,如圖八所示。
圖七、OR CAD畫面Y=W

圖八、OR CAD畫面Y=D
有關修改各參數值(初始值)功能的操作程序,將利用下面一序列的畫面逐一說明:
圖九、診斷器參數修改瀏覽畫面
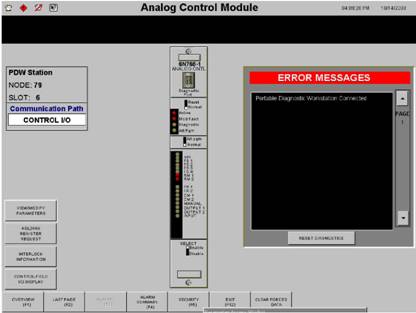
本畫面為提供啟動修改或讀取參數值,使用人必須先按“F5”登入後才能做參數值的修改,“View/Modification”鍵在完成登入後,會變成灰色。
圖十、診斷器參數控制畫面
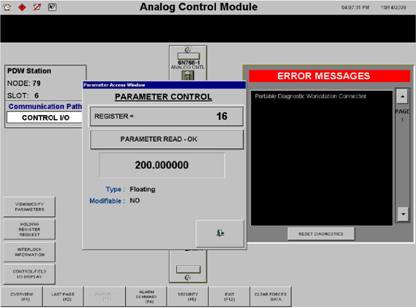
本畫面主要是供讀取參數值,在前畫面按下“View/Modification”鍵後將出現一個視窗。依畫面顯示“Modifiable: NO”表示不能從診斷器上修改,即僅可供讀取。
圖十一、診斷器參數控制操作畫面

本畫面主要是供讀取及修改參數值,在畫面上按下“SELECT PARAMETER REGISTER”鍵後出現另一個視窗“Enter Register”,並鍵入17,本例子是假設FID FI值原已設定為D,故可以由診斷器修改參數值。並依前面所述其相對應之FID則寫入Register 17 (D)。
圖十二、診斷器參數控制讀取畫面
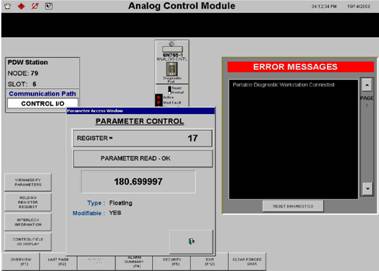
在前圖的視窗上按下“OK”後在本畫面視窗“PARAMETER CONTROL”上顯示 Register 17,另顯示其相關值為180.699997。在視窗的下方則顯示“Modifiable:Yes”,即表示可以從診斷器上做修改。
圖十三、診斷器參數控制修改畫面

在前圖視窗按下“OK”後,本畫面視窗“PARAMETER CONTROL”上顯示Register 17,伴隨的“Enter Value視窗,可輸入Register 17的新參數值190。
圖十四、診斷器參數控制已修改畫面
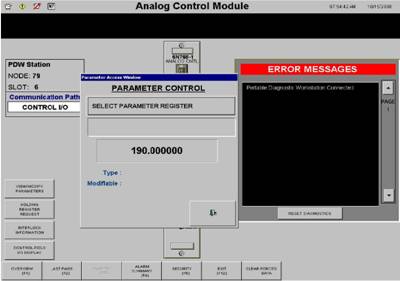
在前圖視窗按下“OK”後,本畫面視窗“PARAMETER CONTROL”上顯示Register 17 的值已修改為190.000000。這一個值可以重複圖十至圖十四的步驟予以修改。原有的值則可經由重設置模組之方式予以儲存。
以上所討論的是Analog Variable初始值為浮點數,其次介紹Analog Variable初始值為整數:

在此符號中,F1初始值將為整數的格式,其數值從0到32767且診斷器可以作線上修改,其內容同樣地可經由修改Analog Variable 邏輯元素的第一個部份資料,類似修改浮點數之初始值的同樣方法,只是其數值係採用整數
上述符號之編碼為xxxYnnnnn.其中xxx為初始值之序數由1至119間任一數字
Y是在定義“可修改的狀態”
設Y=D 表示可由診斷器修改初始值設Y=W 表示可由VDU修改初始值nnnnn為可變的數值從0到32767有關修改整數參數值的操作程序可以參考修改浮點數參數值的操作程序。
五、診斷器配合可攜帶型測試箱(Test Box)之使用
數位型測試箱(8N82)及數比型測試箱(8N83)可以測試機櫃內特定的控制模組,如果不使用診斷器,則僅可作有限的測試,有些測試結果亦無法獲得。反之,如果使用診斷器對觀察測試結果(諸如類比信號)將有更多的受益。
注 意
現場I/O跳線組件(KCH3900-1)在測試電纜連接至可攜帶型測試箱前必須拔除。
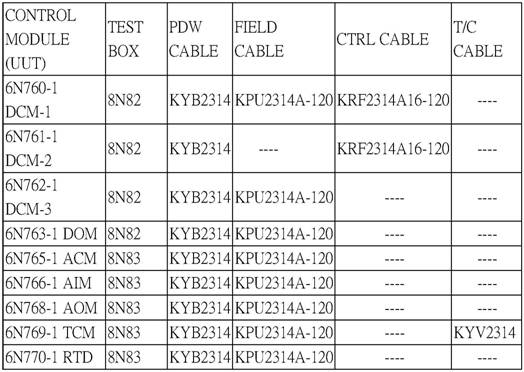
依測試的模組不同,須選擇適當的測試箱及不同的電纜,表5列出不同模組所需的不同的設備。這裡要提醒在RMU機櫃內才有接線板,但控制模組(DCM)控制部份的測試則需將支架托出才能在支架後面找到接線板。
表5 測試箱(Test Box)及所需的電纜
六、結語
本文介紹的診斷器係由DRS廠家自行開發製造,在設計上可以完全配合該公司的產品,其診斷的功能也經廠家的測試通過後才交給台電,因此,品質上應相當可靠,本設備除了可以診斷各模組的情況外,還可以驗證模組的輸出功能以及各種參數的變更,用途可謂多方面,該設備係目前龍門核能電廠唯有最新的產品,電廠維護人員需要一段的使用時間與經驗,在熟練後應可以發揮其功效,也盼望這個診斷器將來對電廠控制系統設備的維修工作有所助益。










